
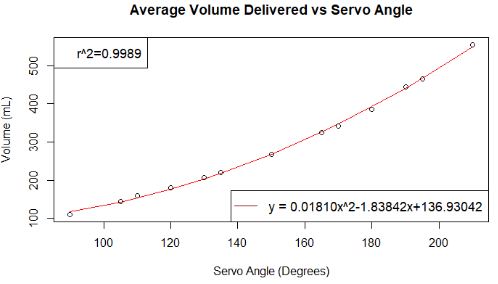
Also worth noting is that the servo angle of 210 degrees has been identified as a reasonable maximum angle for the servo. Commands for the servo to compress the bag past this angle result in a stall of the servo due to torque limitations, and are therefore not useful. Commands beyond this region would be unnecessary regardless, as the achievable volume is already surpassing the nominal target value, and the bag is compressed almost completely at this angle.
Next, the electronics within the control box will be connected and tested. The entire design will also be painted.