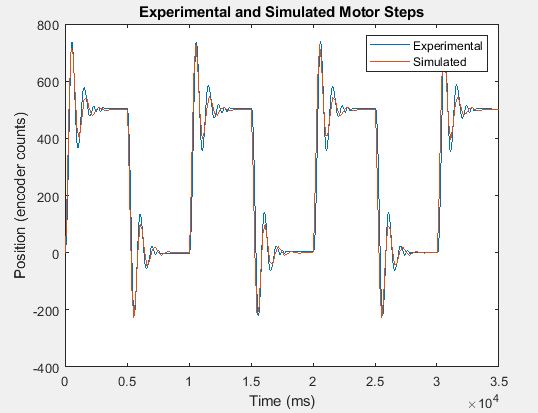
Today, the DC motor was characterized using a simple DC motor model, which includes a pole at the origin, a pole at -1/tau, and motor constant Km.
The step response of the motor was analyzed (encoder counts vs time), and the parameters were determined as tau = 0.3519, and Km = 12.0969. These values were used in Simulink to simulate the action of the motor.
Now that the motor has been modeled, simulations can be run to determine an optimal controller to use within the code.
A servo motor has also been ordered for testing. The servo has a maximum torque of about 21.5 kg-cm, or 1.96 Nm. This is slightly higher than the torque of the DC motor